Super-Clothoids
Computer Graphics Forum (Proceedings of the Eurographics 2012 Conference), to appear
Abstract
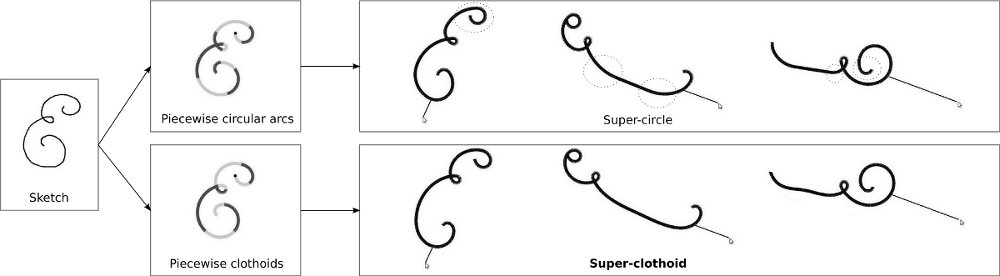
Piecewise clothoids are 2D curves with continuous, piecewise linear curvature. Due to their
smoothness properties, they have been extensively used in road design and robot path planning, as
well as for the compact representation of hand-drawn curves. In this paper we present the
Super-Clothoid model, a new mechanical model that for the first time allows for the computing of
the dynamics of an elastic, inextensible piecewise clothoid. We first show that the kinematics of
this model can be computed analytically depending on the Fresnel integrals, and precisely
evaluated when required. Secondly, the discrete dynamics, naturally emerging from the Lagrange
equations of motion, can be robustly and efficiently computed by performing and storing formal
computations as far as possible, recoursing to numerical evaluation only when assembling the
linear system to be solved at each time step. As a result, simulations turn out to be both
interactive and stable, even for large displacements of the rod. Finally, we demonstrate the
versatility of our model by handling various boundary conditions for the rod as well as complex
external constraints such as frictional contact, and show that our model is perfectly adapted to
inverse statics. Compared to lower-order models, the super-clothoid appears as a more natural and
aesthetic primitive for bridging the gap between 2D geometric design and physics-based
deformation.
Download
Acknowledgments
We were happy to use the source code provided by Ilya Baran and his
co-authors for fitting curves with piecewise
clothoids, allowing us to couple our model to a user-friendly interface and then to build a
full pipeline from hand-drawn design to physics-based animation. Thanks to Alexandre
Derouet-Jourdan for his help in this process. Thanks also to Romain Casati for his code on
articulated rigid bodies. More ressources from us to come...