


Florence Bertails-Descoubes

|
Inria Researcher in Elan team, Inria Grenoble / LJK
|
Short Bio
I am working as a senior researcher ('Directrice de Recherche') at
Inria in Grenoble, France. Since October 2017, I am heading the Elan team focussed on the numerical modeling of complex mechanical phenomena, and originally positioned across Computer Graphics and Computational Mechanics. In 2019 I have created, together with Basile Audoly, the new workshop Graphyz, at the intersection between Computer Graphics and Physics. The first edition of Graphyz has been held in 2019 at Inria in Grenoble. The second edition of Graphyz has been held in 2022 at the Saline Royale of Arc et Senans. Inria recently made a focus on the creation of Elan and Graphyz.
From 2021 to 2024 I have been serving as an Associate Editor of ACM Transactions on Graphics. I have defended my habilitation thesis in 2017. In 2014 I have been awarded a Starting Grant from the European Research Council (GEM, 2015 - 2022), to work on the inverse design of slender elastic structures subject to contact and friction.
Before, I was member of the BiPop research group, specialised in the modeling and simulation of nonsmooth dynamic phenomena. In 2006 - 2007, I did a post-doc at the IMAGER Lab of the University of British Columbia, in beautiful Vancouver, where I have been working with Robert Bridson and Christopher Batty on physically-based models for coupling fluid and solid structures. During my Ph.D. thesis completed at Grenoble INP (awarded the 2006 SPECIF Prize), I have been working on hair simulation under the supervision of Marie-Paule Cani (Grenoble INP) and Basile Audoly (CNRS).
From 2021 to 2024 I have been serving as an Associate Editor of ACM Transactions on Graphics. I have defended my habilitation thesis in 2017. In 2014 I have been awarded a Starting Grant from the European Research Council (GEM, 2015 - 2022), to work on the inverse design of slender elastic structures subject to contact and friction.
Before, I was member of the BiPop research group, specialised in the modeling and simulation of nonsmooth dynamic phenomena. In 2006 - 2007, I did a post-doc at the IMAGER Lab of the University of British Columbia, in beautiful Vancouver, where I have been working with Robert Bridson and Christopher Batty on physically-based models for coupling fluid and solid structures. During my Ph.D. thesis completed at Grenoble INP (awarded the 2006 SPECIF Prize), I have been working on hair simulation under the supervision of Marie-Paule Cani (Grenoble INP) and Basile Audoly (CNRS).
What's new
- (April 2026) In collaboration with Yale University, we have a paper on curly hair editing accepted to ACM Siggraph 2026!
- (March 2026) Our paper on Mixed Super-Circles is out! The accompanying code, Circonflex, is freely distributed under the GNU GPL v3 Licence.
Research Interests

|

|

|

|

|
My research interests deal with the mathematical modeling and the numerical simulation of complex
mechanical objects featuring a rich shape and/or motion. Typical applications include computer
graphics and virtual prototyping for industry. More specifically, I am interested in the following
topics:
- Discrete modeling of dynamic slender structures, such as rods, plates and shells, with applications in hair and cloth simulation
- Geometric representation and design of space curves
- Simulation of contact and friction, within the nonsmooth dynamic settings
- Mathematical modeling of heterogeneous materials, such as granulars and fibrous materials
- Parameter identification (inverse modeling problems), and control of physics-based simulators.
Selected Publications
The full list of my publications, including conference abstracts and talks, is given
here.
Below is a list of main publications.
_
|
Curvature Space Editing of Highly-Coiled Hair
Alvin Shi, Florence Bertails-Descoubes, A.M. Darke, Theodore Kim. ACM SIGGRAPH'26 Conference paper, to appear in 2026. [Project website] Summary: Due to its highly curved geometry, tightly coiled hair is challenging to model and edit using standard position-based tools. In this work we propose using material curvatures and twists to analyze and edit tightly coiled hair styles. Our method relies on the geometry of super-helices, primitives parametrized by piecewise constant curvatures and twists, whose helical geometry naturally resembles a coiled hair strand. Using this curvature/twist space, we introduce new editing tools that allow us to expand, shrink, "ruffle", interpolate or guide the position of coiled hair in a natural way. We present analytical expressions for geometry and gradients that allow our method to run efficiently and without the need for any training data. We successfully apply our tools to highly coiled simulated hairs, as well as those generated procedurally.. |
_
|
Mixed Super-Circles
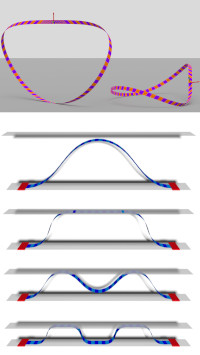
Emile Hohnadel, Thibaut Métivet, Florence Bertails-Descoubes. Computer Graphics Forum (Proceedings of Eurographics 2026), to appear in 2026. [HAL project website][Paper on HAL (PDF)][Editor link (Open Access)][Movie (MP4)][Circonflex source code] Summary: We introduce mixed super-circles, a position-curvature formulation of the original dynamic 2D super-helix model. Compared to the latter, purely curvature-based model --- the so-called chained formulation --- the mixed formulation that we propose here drastically reduces the algorithmic complexity of the solving scheme --- from quadratic to quasi-linear --- and simplifies the handling of positional constraints, including contacts. As such, it recovers the main advantages of classical position-based models, while at the same time preserving the high-order convergence of curvature-based models, hence offering an interesting trade-off. Furthermore, the smooth, piecewise circular arc representation of super-circles allows to avoid the spurious jumps in contact forces that are difficult to get rid of with position-based models. Our model is validated quantitatively against demanding mechanical tests involving contact, friction, snapping, and vibrations. Moreover, its versatility, robustness and efficiency are demonstrated through several interactive dynamic scenarios featuring multiple planar elastic rods subject to various types of boundary conditions and constraints. The corresponding source code, Circonflex, is freely delivered to the research community under the GNU GPL v3 licence. |
_
|
A Noetherian approach to invariants for the statics and dynamics of elastic rods
Sébastien Neukirch, Florence Bertails-Descoubes. International Journal of Non-Linear Mechanics, February 2026. [HAL project website][Paper on HAL (PDF)][Editor link (Open Access)] Summary: The static-dynamic analogy discovered by Gustav Kirchhoff in 1859 shows that the statics of an elastic beam is equivalent to the dynamics of a spinning top. This analogy, where time and angular velocity are, for example, equivalent to arclength and curvatures, allows the use of Emmy Noether's 1918 theorem on continuous symmetries to unravel a quantity that is invariant along elastic rods at equilibrium. A spinning top having a Lagrangian independent of time will have its mechanical energy constant in time. In the same manner, an elastic rod with uniform elastic properties will have the sum of its curvature energy and its tension force uniform along the structure. This arclength invariance property is known in simple cases, but the present approach generalises it to more complex scenarios where extensibility, shear, conservative loads (e.g. gravity), and contact are involved. Moreover, still using Noether's theorem and bringing to light the continuous symmetries of the Lagrangian of the variational approach, we recover all known invariants for the statics and dynamics of rods and ribbons, including coordinate invariants. Furthermore, we show how the arclength invariant may be used to obtain pivotal information on some landmark elastic rod problems, including confinement buckling, sliding sleeves, or plectonemes. Finally, we extend the approach to vibrations. Overall, this paper is an attempt to explain, unify and extend all previous results on rod invariants thanks to the beautiful Noetherian formalism, and to show its practical use on a few relevant applications. |
_
|
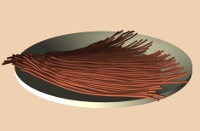
Contact detection between curved fibres: high order makes a difference
Octave Crespel, Emile Hohnadel, Thibaut Métivet, Florence Bertails-Descoubes. ACM Transactions on Graphics, July 2024 (ACM SIGGRAPH'24). [HAL project website][Paper on HAL (PDF)][Editor link (Open Access)][Movie (MP4)][Source code] Summary: Computer Graphics has a long history in the design of effective algorithms for handling contact and friction between solid objects. For the sake of simplicity and versatility, most methods rely on low-order primitives such as line segments or triangles, both for the detection and the response stages. In this paper we carefully analyse, in the case of fibre systems, the impact of such choices on the retrieved contact forces. We highlight the presence of artifacts in the force response that are tightly related to the low-order geometry used for contact detection. Our analysis draws upon thorough comparisons between the high-order super-helix model and the low-order discrete elastic rod model. These reveal that when coupled to a low-order, segment-based detection scheme, both models yield spurious jumps in the contact force profile. Moreover, these artifacts are shown to be all the more visible as the geometry of fibres at contact is curved. In order to remove such artifacts we develop an accurate high-order detection scheme between two mooth curves, which relies on an efficient adaptive pruning strategy. We use this algorithm to detect contact between super-helices at high precision, allowing us to recover, in the range of wavy to highly curly fibres, much smoother force profiles during sliding motion than with a classical segmentbased strategy. Furthermore, we show that our approach offers better scaling properties in terms of efficiency vs. precision compared to segment-based approaches, making it attractive for applications where accurate and reliable forces are desired. Finally, we demonstrate the robustness and accuracy of our fully high-order approach on a challenging hair combing scenario. |
_
|
Merci: Mixed curvature-based elements for computing equilibria of thin elastic ribbons
Raphaël Charrondière, Sébastien Neukirch, Florence Bertails-Descoubes. ACM Transactions on Graphics, August 2024 (orally presented at SIGGRAPH'24). [HAL project website][Paper on HAL (PDF)][Editor link (Open Access)][Movie (MP4)][Supplemental (PDF)][Source code][Script examples of the paper (ZIP)] Summary: Thin elastic ribbons represent a class of intermediary objects lying in-between thin elastic plates and thin elastic rods. Although the two latter families of thin structures have received much interest from the Computer Graphics community over the last decades, ribbons have seldom been considered and modelled numerically so far, in spite of a growing number of applications in Computer Design. In this paper, starting from the reduced developable ribbon models recently popularised in Soft Matter Physics, we propose a both accurate and efficient algorithm for computing the statics of a thin elastic ribbon. Inspired by the super-clothoid model for thin elastic rods, our method relies on compact ribbon elements whose normal curvature varies linearly with respect to arc length s, while their geodesic torsion is quadratic in s. In contrast however, for the sake of efficiency our algorithm avoids building a fully reduced kinematic chain and instead treats each element independently, gluing them only at the final solving stage through well-chosen bilateral constraints. Thanks to this mixed variational strategy, which yields a banded Hessian, our algorithm recovers the linear complexity of low-order models while preserving the quadratic convergence of curvature-based models. As a result, our approach is scalable to a large number of elements, and suitable for various boundary conditions and unilateral contact constraints, making it possible to handle challenging scenarios such as confined buckling experiments or M�bius bands with contact. Remarkably, our mixed algorithm proves an order of magnitude faster compared to Discrete Element Ribbon models of the literature while achieving, in a few seconds only, high accuracy levels that remain out of reach for such low-order models. Additionally, our numerical model can incorporate various ribbon energies, including the Ribext model for quasi-developable ribbons recently introduced in Physics, which allows to transition smoothly between a rectangular Kirchhoff rod and a (developable) Sadowsky ribbon. Our numerical scheme is carefully validated against demanding experiments of the Physics literature, which demonstrates its accuracy, efficiency, robustness, and versatility. Our MERCI code is publicly available at https://gitlab.inria.fr/elan-public-code/merci for the sake of reproducibility and future benchmarking. |
_
|
Modelling a feather as a strongly anisotropic elastic shell
Jean Jouve, Victor Romero, Rahul Narain, Laurence Boissieux, Theodore Kim, Florence Bertails-Descoubes. ACM SIGGRAPH'24 Conference paper. [HAL project website][Paper on HAL (PDF)][Editor link (Open Access)][Movie (MP4)][Supplemental (PDF)][Source code (to come soon)] Summary: Feathers exhibit a highly anisotropic behaviour, governed by their complex hierarchical microstructure composed of individual hairs (barbs) clamped onto a spine (rachis) and attached to each other through tiny hooks (barbules). Previous methods in computer graph- ics have approximated feathers as strips of cloth, thus failing to cap- ture the particular macroscopic nonlinear behaviour of the feather surface (vane). To investigate the anisotropic properties of a feather vane, we design precise measurement protocols on real feather samples. Our experimental results suggest a linear strain-stress relationship of the feather membrane with orientation-dependent coefficients, as well as an extreme ratio of stiffnesses in the barb and barbule direction, of the order of 10 4 . From these findings we build a simple continuum model for the feather vane, where the vane is represented as a three-parameter anisotropic elastic shell. However, implementing the model numerically reveals severe lock- ing and ill-conditioning issues, due to the extreme stiffness ratio between the barb and the barbule directions. To resolve these is- sues, we align the mesh along the barb directions and replace the stiffest modes with an inextensibility constraint. We extensively validate our membrane model against real-world laboratory mea- surements, by using an intermediary microscale model that allows us to limit the number of required lab experiments. Finally, we enrich our membrane model with anisotropic bending, and show its practicality in graphics-like scenarios like a full feather and a larger-scale bird. Code and data for this paper are available at https://gitlab.inria.fr/elan-public-code/feather-shell/. |
_
|
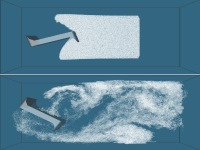
Revisiting the role of friction coefficients in granular collapses: confrontation of 3D non-smooth simulations with experiments
Gauthier Rousseau, Thibaut Métivet, Hugo Rousseau, Gilles Daviet, Florence Bertails-Descoubes. Journal of Fluid Mechanics, November 2023. [HAL project website][Paper on HAL (PDF)][Editor link (Open Access)][Sand6 source code] Summary: In this paper, transient granular flows are examined both numerically and experimentally. Simulations are performed using the continuous three-dimensional (3-D) granular model introduced in Daviet & Bertails-Descoubes 2016, which represents the granular medium as an inelastic and dilatable continuum subject to the Drucker-Prager yield criterion in the dense regime. One notable feature of this numerical model is to resolve such a non-smooth rheology without any regularisation. We show that this non-smooth model, which relies on a constant friction coefficient, is able to reproduce with high fidelity various experimental granular collapses over inclined erodible beds, provided the friction coefficient is set to the avalanche angle and not to the stop angle, as generally done. In order to better characterise the range of validity of the fully plastic rheology in the context of transient frictional flows, we further revisit scaling laws relating the shape of the final collapse deposit to the initial column aspect ratio, and accurately recover established power-law dependences up to aspect ratios of the order of 10. The influence of sidewall friction is then examined through experimental and simulated collapses with varying channel widths. The analysis offers a comprehensive framework for estimating the effective flow thickness in relation to the channel width, thereby challenging previously held assumptions regarding its estimation in the literature. Finally, we discuss the possibility to extend the constant coefficient model with a hysteretic model in order to refine the predictions of the early-stage dynamics of the collapse. This illustrates the potential effects of such phenomenology on transient flows, paving the way to more elaborate analysis. |
_
|
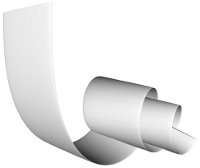
Randomly stacked open cylindrical shells as functional mechanical energy absorber
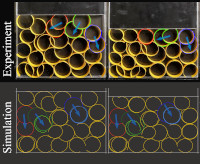
Tomohiko G. Sano*, Emile Hohnadel*, Toshiyuki Kawata, Thibaut Métivet, Florence Bertails-Descoubes. Nature Communications Materials, August 2023. (*) joint first authors [HAL project website][Paper on HAL (PDF)][Editor link (Open Access)] Summary: Structures with artificially engineered mechanical properties, often called mechanical metamaterials, are interesting for their tunable functionality. Various types of mechanical metamaterials have been proposed in the literature, designed to harness light or magnetic interactions, structural instabilities in slender or hollow structures, and contact friction. However, most of the designs are ideally engineered without any imperfections, in order to perform deterministically as programmed. Here, we study the mechanical performance of randomly stacked cylindrical shells, which act as a disordered mechanical metamaterial. Combining experiments and simulations, we demonstrate that the stacked shells can absorb and store mechanical energy upon compression by exploiting large deformation and relocation of shells, snap-fits, and friction. Although shells are oriented randomly, the system exhibits statistically robust mechanical performance controlled by friction and geometry. Our results demonstrate that the rearrangement of flexible components could yield versatile and predictive mechanical responses. |
_
|
Physical validation of simulators in Computer Graphics: A new framework dedicated to slender elastic structures and frictional contact
Victor Romero, Mickaël Ly, Abdullah Haroon Rasheed, Raphaël Charrondière, Arnaud Lazarus, Sébastien Neukirch, Florence Bertails-Descoubes. ACM SIGGRAPH 2021. [Project website][Paper (PDF)][Movie (MP4)][Supplemental (PDF)][Recipe Manual (PDF)][Master Curves (zip)] Summary: We introduce a selected set of protocols inspired from the Soft Matter Physics community in order to validate Computer Graphics simulators of slender elastic structures possibly subject to dry frictional contact. Although these simulators were primarily intended for feature film animation and visual effects, they are more and more used as virtual design tools for predicting the shape and deformation of real objects; hence the need for a careful, quantitative validation. Our tests, experimentally verified, are designed to evaluate carefully the predictability of these simulators on various aspects, such as bending elasticity, bend-twist coupling, and frictional contact. We have passed a number of popular codes of Computer Graphics through our benchmarks by defining a rigorous, consistent, and as fair as possible methodology. Our results show that while some popular simulators for plates/shells and frictional contact fail even on the simplest scenarios, more recent ones, as well as well-known codes for rods, generally perform well and sometimes even better than some reference commercial tools of Mechanical Engineering. To make our validation protocols easily applicable to any simulator, we provide an extensive description of our methodology, and we shall distribute all the necessary model data to be compared against. |

|
Projective Dynamics with Dry Frictional Contact
Mickaël Ly, Jean Jouve, Laurence Boissieux, Florence Bertails-Descoubes. ACM SIGGRAPH 2020. [Project website][Paper (PDF)][Movie(MP4)] Summary: Projective dynamics was introduced a few years ago as a fast method to yield an approximate yet stable solution to the dynamics of nodal systems subject to stiff internal forces. Previous attempts to include contact forces in that framework considered adding a quadratic penalty energy to the global system, which however broke the simple, constant matrix, structure of the global linear equation, while failing to treat contact in an implicit manner. In this paper we propose a simple yet effective method to integrate in a unified and semi-implicit way contact as well as dry frictional forces into the nested architecture of Projective dynamics. Assuming that contacts apply to nodes only, the key is to split the global matrix into a diagonal and a positive matrix, and use this splitting in the local step so as to make a good prediction of frictional contact forces at next iteration. Each frictional contact force is refined independently in the local step, while the original efficient structure of the global step is left unchanged. We apply our algorithm to cloth simulation and show that contact and dry friction can be captured at a reasonable precision within a few iterations only, hence one order of magnitude faster compared to global implicit contact solvers of the literature. |

|
Learning to Measure the Static Friction Coefficient in Cloth Contact
Abdullah Haroon Rasheed, Victor Romero, Florence Bertails-Descoubes, Stefanie Wuhrer, Jean-Sébastien Franco, Arnaud Lazarus. IEEE CVPR, June 2020 (selected for oral presentation). This paper has been extended to a full journal version at IEEE PAMI in 2021. [Project website][Movie(MP4)] Summary: Measuring friction coefficients between cloth and an external body is a longstanding issue in mechanical engineering, never yet addressed with a pure vision-based system. The latter offers the prospect of simpler, less invasive friction measurement protocols compared to traditional ones, and can vastly benefit from recent deep learning advances. Such a novel measurement strategy however proves challenging, as no large labelled dataset for cloth contact exists, and creating one would require thousands of physics work-bench measurements with broad coverage of cloth-material pairs. Using synthetic data instead is only possible assuming the availability of a soft-body mechanical simulator with true-to-life friction physics accuracy, yet to be verified. We propose a first vision-based measurement network for friction between cloth and a substrate, using a simple and repeatable video acquisition protocol. We train our network on purely synthetic data generated by a state-of-the-art frictional contact simulator, which we carefully calibrate and validate against real experiments under controlled conditions. We show promising results on a large set of contact pairs between real cloth samples and various kinds of substrates, with 93.6% of all measurements predicted within 0.1 range of standard physics bench measurements. |
|
Numerical modeling of inextensible elastic ribbons with curvature-based elements
Raphaël Charrondière, Florence Bertails-Descoubes, Sébastien Neukirch, Victor Romero. Computer Methods in Applied Mechanics and Engineering, June 2020. [Preprint (PDF)][Movie(MP4)][Editor link] Summary: We propose a robust and efficient numerical model to compute stable equilibrium configurations of clamped elastic ribbons featuring arbitrarily curved natural shapes. Our spatial discretization scheme relies on elements characterized by a linear normal curvature and a quadratic geodesic torsion with respect to arc length. Such a high-order discretization allows for a great diversity of kinematic representations, while guaranteeing the surface of the ribbon to remain perfectly inextensible. Stable equilibria are calculated by minimizing the sum of the gravitational and elastic energies of the ribbon, under a developability constraint. Our algorithm compares favorably to standard shooting and collocation methods, as well as to experiments. It furthermore shows significant differences in behavior compared to numerical models for thin elastic rods, while yielding a substantial speed-up compared to a more general thin elastic shell simulator. These results confirm the benefit of designing a special numerical model dedicated to ribbons. |
|
Inverse Elastic Shell Design with Contact and Friction
Mickaël Ly, Romain Casati, Florence Bertails-Descoubes, Mélina Skouras, Laurence Boissieux. ACM SIGGRAPH Asia 2018. [Project website] [Paper (PDF)][Movie(MP4)][Press Release] Summary: We propose an inverse strategy for modeling thin elastic shells physically, just from the observation of their geometry. Our algorithm takes as input an arbitrary target mesh, and interprets this configuration automatically as a stable equilibrium of a shell simulator under gravity and frictional contact constraints with a given external object. Unknowns are the natural shape of the shell (i.e., its shape without external forces) and the frictional contact forces at play, while the material properties (mass density, stiffness, friction coefficients) can be freely chosen by the user. Such an inverse problem formulates as an ill-posed nonlinear system subject to conical constraints. To select and compute a plausible solution, our inverse solver proceeds in two steps. In a first step, contacts are reduced to frictionless bilateral constraints and a natural shape is retrieved using the adjoint method. The second step uses this result as an initial guess and adjusts each bilateral force so that it projects onto the admissible Coulomb friction cone, while preserving global equilibrium. To better guide minimization towards the target, these two steps are applied iteratively using a degressive regularization of the shell energy. We validate our approach on simulated examples with reference material parameters, and show that our method still converges well for material parameters lying within a reasonable range around the reference, and even in the case of arbitrary meshes that are not issued from a simulation. We finally demonstrate practical inversion results on complex shell geometries freely modeled by an artist or automatically captured from real objects, such as posed garments or soft accessories. |

|
An Implicit Frictional Contact Solver for Adaptive Cloth Simulation
Jie Li, Gilles Daviet, Rahul Narain, Florence Bertails-Descoubes, Matthew Overby, George Brown, Laurence Boissieux. ACM SIGGRAPH 2018. [Project website] [Paper (PDF)] [Movie (MP4)][Source Code] Summary:Cloth dynamics plays an important role in the visual appearance of moving characters. Properly accounting for contact and friction is of utmost importance to avoid cloth-body and cloth-cloth penetration and to capture typical folding and stick-slip behavior due to dry friction. We present here the first method able to account for cloth contact with exact Coulomb friction, treating both cloth self-contacts and contacts occurring between the cloth and an underlying character. Our key contribution is to observe that for a nodal system like cloth, the frictional contact problem may be formulated based on velocities as primary variables, without having to compute the costly Delassus operator. Then, by reversing the roles classically played by the velocities and the contact impulses, conical complementarity solvers of the literature can be adapted to solve for compatible velocities at nodes. To handle the full complexity of cloth dynamics scenarios, we have extended this base algorithm in two ways: first, towards the accurate treatment of frictional contact at any location of the cloth, through an adaptive node refinement strategy; second, towards the handling of multiple constraints at each node, through the duplication of constrained nodes and the adding of pin constraints between duplicata. Our method allows us to handle the complex cloth-cloth and cloth-body interactions in full-size garments with an unprecedented level of realism compared to former methods, while maintaining reasonable computational timings. |
|
Inverse design of an isotropic suspended Kirchhoff rod: theoretical and numerical results on the uniqueness of the natural shape
Florence Bertails-Descoubes*, Alexandre Derouet-Jourdan*, Victor Romero, Arnaud Lazarus. Proceedings of the Royal Society A, April 2018. (*) joint first authors [Project website][Editor link] [Preprint (PDF)] [Movie (MP4)] Summary: Solving the equations for Kirchhoff elastic rods has been widely explored for decades in mathematics, physics and computer science, with significant applications in the modelling of thin flexible structures such as DNA, hair or climbing plants. As demonstrated in previous experimental and theoretical studies, the natural curvature plays an important role in the equilibrium shape of a Kirchhoff rod, even in the simple case where the rod is isotropic and suspended under gravity. In this paper, we investigate the reverse problem: can we characterize the natural curvature of a suspended isotropic rod, given an equilibrium curve? We prove that although there exists an infinite number of natural curvatures that are compatible with the prescribed equilibrium, they are all equivalent in the sense that they correspond to a unique natural shape for the rod. This natural shape can be computed efficiently by solving in sequence three linear initial value problems, starting from any framing of the input curve. We provide several numerical experiments to illustrate this uniqueness result, and finally discuss its potential impact on non-invasive parameter estimation and inverse design of thin elastic rods. |

|
A Semi-Implicit Material Point Method for the Continuum Simulation of Granular Materials
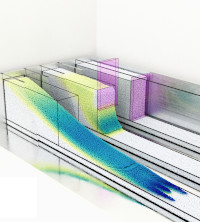
Gilles Daviet, Florence Bertails-Descoubes. ACM SIGGRAPH 2016. [Project website] [Paper (PDF)] [Movie (MP4)] [Supplemental (PDF)] [Source code page][CNRS highlight] Summary: We present a new continuum-based method for the realistic simulation of large-scale free-flowing granular materials. We derive a compact model for the rheology of the material, which accounts for the exact nonsmooth Drucker-Prager yield criterion combined with a varying volume fraction. Thanks to a semi-implicit time-stepping scheme and a careful spatial discretization of our rheology built upon the Material-Point Method, we are able to preserve at each time step the exact coupling between normal and tangential stresses, in a stable way. This contrasts with previous approaches which either regularize or linearize the yield criterion for implicit integration, leading to unrealistic behaviors or visible grid artifacts. Remarkably, our discrete problem turns out to be very similar to the discrete contact problem classically encountered in multibody dynamics, which allows us to leverage robust and efficient nonsmooth solvers from the literature. We validate our method by successfully capturing typical macroscopic features of some classical experiments, such as the discharge of a silo or the collapse of a granular column. Finally, we show that our method can be easily extended to accommodate more complex scenarios including two-way rigid body coupling as well as anisotropic materials. |
|
Nonsmooth simulation of dense granular flows with pressure-dependent yield stress
Gilles Daviet, Florence Bertails-Descoubes. Journal of Non-Newtonian Fluid Mechanics, August 2016. [Preprint (PDF)] [Editor link] Summary: Understanding the flow of granular materials is of utmost importance for numerous industrial applications including the manufacturing, storing and transportation of grain assemblies (such as cement, pills, or corn), as well as for natural risk assessing considerations. Discrete Element Modeling (DEM) methods, which explicitly represent grain-grain interactions, allow for highly-tunable and precise simulations, but they suffer from a prohibitive computational cost when attempting to reproduce large scale scenarios. Continuum models have been recently investigated to overcome such scalability issues, but their numerical simulation still poses many challenges. In this work we propose a novel numerical framework for the continuous simulation of dilatable materials with pressure-dependent (Coulomb) yield stress. Relying upon convex optimization tools, we show that such a macroscopic, nonsmooth rheology can be interpreted as the exact analogous of the solid frictional contact problem at the heart of DEM methods, extended to the tensorial space. Combined with a carefully chosen finite-element discretization, this new framework allows us to avoid regularizing the continuum rheology while benefiting from the efficiency of nonsmooth optimization solvers, mainly leveraged by DEM methods so far. Our numerical results successfully compare to analytic solutions on model problems, and we retrieve qualitative flow features commonly observed in reported experiments of the literature. |

|
Inverse
Dynamic Hair Modeling with Frictional Contact
Alexandre Derouet-Jourdan, Florence Bertails-Descoubes, Gilles Daviet, Joëlle Thollot. ACM SIGGRAPH Asia 2013. [Project website] [Paper (PDF)] [Movie (MP4)][Other ressources] Summary: In the latest years, considerable progress has been achieved for accurately acquiring the geometry of human hair, thus largely improving the realism of virtual characters. In parallel, rich and robust physics-based simulators have been successfully designed to capture the intricate dynamics of hair due to contact and friction. However, at the moment there exists no consistent pipeline for converting a given hair geometry into a realistic physics-based hair model. Current approaches simply initialize the hair simulator with the input geometry in the absence of external forces. This results in an undesired sagging effect when the dynamic simulation is started, which basically ruins all the efforts put into the accurate design and/or capture of the input hairstyle. In this paper we propose the first method which consistently and robustly accounts for surrounding forces \(-\) gravity and frictional contacts, including hair self-contacts \(-\) when converting a geometric hairstyle into a physics-based hair model. Taking an arbitrary hair geometry as input together with a corresponding body mesh, we interpret the hair shape as a static equilibrium configuration of a hair simulator, in the presence of gravity as well as hair-body and hair-hair frictional contacts. Assuming hair parameters are homogeneous and lie in a plausible range of physical values, we show that this large, underdetermined inverse problem can be formulated as a well-posed constrained optimization problem, which can be robustly and efficiently solved by leveraging the frictional contact solver of the direct hair simulator. Our method was successfully applied to the animation of various hair geometries, ranging from synthetic hairstyles manually designed by an artist to the most recent human hair data reconstructed from capture. |
|
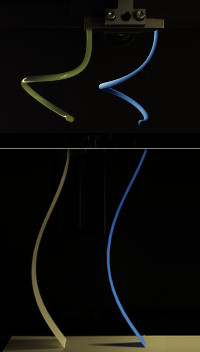
Super Space Clothoids
Romain Casati, Florence Bertails-Descoubes. ACM SIGGRAPH 2013. [Project website] [Paper (PDF)] [Movie (MP4)] [Supplemental material (PDF)][Source code][Inria highlight ] Summary: Thin elastic filaments in real world such as vine tendrils, hair ringlets or curled ribbons often depict a very smooth, curved shape that low-order rod models \(-\) e.g., segment-based rods \(-\) fail to reproduce accurately and compactly. In this paper, we push forward the investigation of high-order models for thin, inextensible elastic rods by building the dynamics of a \(G^2\)- continuous piecewise 3D clothoid: a smooth space curve with piecewise affine curvature. With the aim of precisely integrating the rod kinematic problem, for which no closed-form solution exists, we introduce a dedicated integration scheme based on power series expansions. It turns out that our algorithm reaches machine precision orders of magnitude faster compared to classical numerical integrators. This property, nicely preserved under simple algebraic and differential operations, allows us to compute all spatial terms of the rod kinematics and dynamics in both an efficient and accurate way. Combined with a semi-implicit time-stepping scheme, our method leads to the efficient and robust simulation of arbitrary curly filaments that exhibit rich, visually pleasing configurations and motion. Our approach was successfully applied to generate various scenarios such as the unwinding of a curled ribbon as well as the aesthetic animation of spiral-like hair or the fascinating growth of twining plants. |

|
Floating Tangents for Approximating Spatial
Curves with \(G^1\) Piecewise Helices
Alexandre Derouet-Jourdan, Florence Bertails-Descoubes, Joëlle Thollot. Computer-Aided Geometric Design, June 2013. [Project website] [Editor link][Preprint (PDF)][Movie (MP4)] Summary: Curves are widely used in computer science to describe real-life objects such as slender deformable structures. Using only 3 parameters per element, piecewise helices offer an interesting and compact way of representing digital curves. In this paper, we present a robust and fast algorithm to approximate B�zier curves with \(G^1\) piecewise helices. Our approximation algorithm takes a B�zier spline as input along with an integer N and returns a piecewise helix with N elements that closely approximates the input curve. The key idea of our method is to take N+1 evenly distributed points along the curve, together with their tangents, and interpolate these tangents with helices by slightly relaxing the points. Building on previous work, we generalize the proof for Ghosh's co-helicity condition, which serves us to guarantee the correctness of our algorithm in the general case. Finally, we demonstrate both the efficiency and robustness of our method by successfully applying it on various datasets of increasing complexity, ranging from synthetic curves created by an artist to automatic image-based reconstructions of real data such as hair, heart muscular fibers or magnetic field lines of a star. (Erratum: The original publication contained a typo in Appendix A (p. 46, above Remark 1, conditions for expressing \(\varphi * \) have to be switched), which led to an incorrect formulation in the 2d case. This has been fixed in the revised version. Be sure to download the version above.) |

|
Super-Clothoids
Florence Bertails-Descoubes. Eurographics 2012. [Project website] [Paper (PDF)] [Movie (MP4)] Summary: Piecewise clothoids are 2D curves with continuous, piecewise linear curvature. Due to their smoothness properties, they have been extensively used in road design and robot path planning, as well as for the compact representation of hand-drawn curves. In this paper we present the Super-Clothoid model, a new mechanical model that for the first time allows for the computing of the dynamics of an elastic, inextensible piecewise clothoid. We first show that the kinematics of this model can be computed analytically depending on the Fresnel integrals, and precisely evaluated when required. Secondly, the discrete dynamics, naturally emerging from the Lagrange equations of motion, can be robustly and efficiently computed by performing and storing formal computations as far as possible, recoursing to numerical evaluation only when assembling the linear system to be solved at each time step. As a result, simulations turn out to be both interactive and stable, even for large displacements of the rod. Finally, we demonstrate the versatility of our model by handling various boundary conditions for the rod as well as complex external constraints such as frictional contact, and show that our model is perfectly adapted to inverse statics. Compared to lower-order models, the super-clothoid appears as a more natural and aesthetic primitive for bridging the gap between 2D geometric design and physics-based deformation. |

|
A Hybrid Iterative Solver for Robustly Capturing Coulomb Friction in Hair Dynamics
Gilles Daviet, Florence Bertails-Descoubes, Laurence Boissieux. ACM SIGGRAPH Asia 2011. [Project website] [Paper (PDF)] [Movie (MP4)] Summary: Dry friction between hair fibers plays a major role in the collective hair dynamic behavior as it accounts for typical nonsmooth features such as stick-slip instabilities. However, due the challenges posed by the modeling of nonsmooth friction, previous mechanical models for hair either neglect friction or use an approximate smooth friction model, thus losing important visual features. In this paper we present a new generic robust solver for capturing Coulomb friction in large assemblies of tightly packed fibers such as hair. Our method is based on an iterative algorithm where each single contact problem is efficiently and robustly solved by introducing a hybrid strategy that combines a new zero-finding formulation of (exact) Coulomb friction together with an analytical solver as a fail-safe. Our global solver turns out to be very robust and highly scalable as it can handle up to a few thousand densely packed fibers subject to tens of thousands frictional contacts at a reasonable computational cost. It can be conveniently combined to any fiber model with various rest shapes, from smooth to curly. Our results, visually validated against real hair motions, depict typical hair collective effects and greatly enhance the realism of standard hair simulators. (Erratum: The original publication contained a typo in Appendix A.1, which led to an incorrect formulation for the jacobian. This has been fixed in the revised version. Be sure to download the version above.) |
|
A Nonsmooth Newton Solver for Capturing Exact Coulomb Friction in
Fiber Assemblies
Florence Bertails-Descoubes, Florent Cadoux, Gilles Daviet, Vincent Acary. ACM Transactions on Graphics, January 2011. (Orally presented at the ACM SIGGRAPH 2011 Conference in Vancouver, in August 2011). [Project website] [Paper (PDF)] [Movie (MPG)] [Slides (PDF)][Source Code] Summary: We focus on the challenging problem of simulating thin elastic rods in contact, in the presence of friction. Most previous approaches in computer graphics rely on a linear complementarity formulation for handling contact in a stable way, and approximate Coulomb's friction law for making the problem tractable. In contrast, following the seminal work by Alart and Curnier in contact mechanics, we simultaneously model contact and exact Coulomb friction as a zero finding problem of a nonsmooth function. A semi-implicit time-stepping scheme is then employed to discretizethe dynamics of rods constrained by frictional contact: this leads to a set of linear equations subject to an equality constraint involving a non-differentiable function. To solve this one-step problem we introduce a simple and practical nonsmooth Newton algorithm, which proves to be reasonably efficient and robust for systems that are not over-constrained. We show that our method is able to finely capture the subtle effects that occur when thin elastic rods with various geometries enter into contact, such as stick-slip instabilities in free configurations, entangling curls, resting contacts in braid-like structures, or the formation of tight knots under large constraints. Our method can be viewed as a first step towards the accurate modeling of dynamic fibrous materials. |

|
Stable Inverse Dynamic Curves
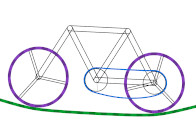
Alexandre Derouet-Jourdan, Florence Bertails-Descoubes, Joëlle Thollot. ACM SIGGRAPH Asia 2010. [Project website] [Paper (PDF)] [Movie (MPEG4)][Supplemental Movie (MPEG4)] (supplemental material available here) Summary: 2d animation is a traditional but fascinating domain that has recently regained popularity both in animated movies and video games. This paper introduces a method for automatically converting a smooth sketched curve into a 2d dynamic curve at stable equilibrium under gravity. The curve can then be physically animated to produce secondary motions in 2d animations or simple video games. Our approach proceeds in two steps. We first present a new technique to fit a smooth piecewise circular arcs curve to a sketched curve. Then we show how to compute the physical parameters of a dynamic rod model (super-circle) so that its stable rest shape under gravity exactly matches the fitted circular arcs curve. We demonstrate the interactivity and controllability of our approach on various examples where a user can intuitively setup efficient and precise 2d animations by specifying the input geometry. |
|
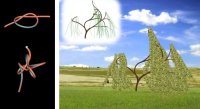
Linear Time Super-Helices
Florence Bertails. Eurographics 2009. [Project website] [Paper (PDF)] [Movie (MPG)] Summary: Thin elastic rods such as cables, phone coils, tree branches, or hair, are common objects in the real world but computing their dynamics accurately remains challenging. The recent Super-Helix model, based on the discrete equations of Kirchhoff for a piecewise helical rod, is one of the most promising models for simulating non-stretchable rods that can bend and twist. However, this model suffers from a complexity at least quadratic in the number of discrete elements, which, in the context of interactive applications, makes it limited to a few number of degrees of freedom - or equivalently to a low number of variations in curvature along the mean curve. This paper proposes a new, recursive scheme for the dynamics of a Super-Helix, inspired by the popular algorithm of Featherstone for serial multibody chains. Similarly to Featherstone's algorithm, we exploit the recursive kinematics of a Super-Helix to propagate elements inertias from the free end to the clamped end of the rod, while the dynamics is solved within a second pass traversing the rod in the reverse way. Besides the gain in linear complexity, which allows us to simulate a rod of complex shape much faster than the original approach, our algorithm makes it straightforward to simulate tree-like structures of Super-Helices, which turns out to be particularly useful for animating trees and plants realistically, under large displacements. (Erratum: the original publication contained a small typo regarding the complexity of the super-helix model, this has been fixed in this (slightly) revised version. Be sure to download the version above.) |
|
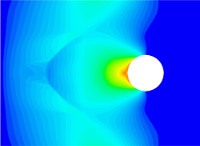
A Fast Variational Framework for Accurate Solid-Fluid Coupling
Christopher Batty, Florence Bertails, Robert Bridson. ACM SIGGRAPH 2007. [Project website] [Paper (PDF)] [Movie (MOV)] Summary: Physical simulation has emerged as a compelling animation technique, yet current approaches to coupling simulations of fluids and solids with irregular boundary geometry are inefficient or cannot handle some relevant scenarios robustly. We propose a new variational approach which allows robust and accurate solution on relatively coarse Cartesian grids, allowing possibly orders of magnitude faster simulation. By rephrasing the classical pressure projection step as a kinetic energy minimization, broadly similar to modern approaches to rigid body contact, we permit a robust coupling between fluid and arbitrary solid simulations that always gives a well-posed symmetric positive semi-definite linear system. We provide several examples of efficient fluid-solid interaction and rigid body coupling with sub-grid cell flow. In addition, we extend the framework with a new boundary condition for free-surface flow, allowing fluid to separate naturally from solids. |

|
Super-Helices for Predicting the Dynamics of Natural Hair
Florence Bertails, Basile Audoly, Marie-Paule Cani, Bernard Querleux, Frédéric Leroy, Jean-Luc Lévêque. ACM SIGGRAPH 2006. [Project website] [Paper (PDF)] [Movie (MPG)] Summary: Simulating human hair is recognized as one of the most difficult tasks in computer animation. In this paper, we show that the Kirchhoff equations for dynamic, inextensible elastic rods can be used for accurately predicting hair motion. These equations fully account for the nonlinear behavior of hair strands with respect to bending and twisting. We introduce a novel deformable model for solving them: each strand is represented by a Super-Helix, i.e., a piecewise helical rod which is animated using the principles of Lagrangian mechanics. This results in a realistic and stable simulation, allowing large time steps. Our second contribution is an in-depth validation of the Super-Helix model, carried out through a series of experiments based on the comparison of real and simulated hair motions. We show that our model efficiently handles a wide range of hair types with a high level of realism. |
SIGGRAPH Courses/Classes

|
Class on
Realistic Hair Simulation: Animation and Rendering, ACM SIGGRAPH 2008 Classes
Organizer: Florence Bertails Lecturers: Florence Bertails, Sunil Hadap, Marie-Paule Cani, Ming Lin, Steve Marschner, Tae-Yong Kim, Zoran Kacic-Alesic, Kelly Ward. [Project website] Summary: The last five years have seen a profusion of innovative solutions to one of the most challenging tasks in character synthesis: hair simulation. This class covers both recent and novel research ideas in hair animation and rendering, and presents time tested industrial practices that resulted in spectacular imagery. |

|
A Course on Strands and
Hair, ACM SIGGRAPH 2007 Courses
Organizer: Sunil Hadap Lecturers: Sunil Hadap, Marie-Paule Cani, Ming Lin, Florence Bertails, Kelly Ward, Steve Marschner, Tae-Yong Kim, Zoran Kacic-Alesic. [ Project website ] Summary: Over the past six years, there has been a Renaissance in hair modeling, rendering, and animation. This course covers the gamut of hair simulation problems and presents working solutions. Topics include recent and novel research ideas, and time-tested industrial practices that created spectacular imagery. |
Scientific Mediation (in French)

|
Approcher des courbes par des hélices
Florence Bertails-Descoubes, Alexandre Derouet-Jourdan. Quadrature, April 2015. [Paper (PDF)] (in French) Summary (French): La forme élancée des structures fibreuses - telles que les cheveux, les brins d'ADN ou encore les tiges de plantes - peut se représenter à l'aide de courbes de l'espace. En particulier, les courbes en hélices par morceaux offrent une représentation intéressante pour modéliser numériquement de telles données, car elle s'avére très compacte : 2 nombres (une courbure et une torsion) suffisent à caractériser un morceau d'hélice circulaire. Dans cet article, nous présentons une méthode à la fois précise et rapide pour approcher une courbe quelconque de l'espace par une courbe lisse en hélices par morceaux. |

|
Simulation Numérique
des Mouvements de Chevelure
Florence Bertails, Basile Audoly, Marie-Paule Cani. Interstices, October 2007. [HTML paper] (in French) Summary (French): Synthétiser le mouvement d'une chevelure suscite un intérêt croissant de la part des développeurs de jeux vidéos ou de films d'animation mais aussi des industriels en cosmétique. Des simulations très réalistes ont pu être réalisées grâce à un travail scientifique basé sur un nouveau modèle mécanique du cheveu sous forme d'hélices par morceaux. Note: A short version of this article has been published in the French journal La Recherche in December 2007. More details here . |
Software
We freely distribute a number
of source codes
accompanying some of our recent papers on the modeling and simulation of
fibers, granular materials, and frictional contact. All source codes are distributed under
the GNU GPLv.3 licence. Proprietary
licenses are also available upon request.
Teaching
Creation of a new course on numerical mechanics for Computer Graphics:
In 2019 I have created, together with Mélina Skouras and Mickaël Ly, a new course
on numerical mechanics (in English), delivered
at ENS Lyon in 2019 and 2020. In 2021 I have adapted this course, together with Thibaut Metivet, to participate in the advanced training course on fibers and frictional contact delivered to the PhD students of the THREAD European Training Network. In 2022 I have reshaped this course, together with Thibaut Metivet and Jean Jouve, to create a new course on numerical mechanics for Computer Graphics (in French) dedicated to third year students at ENSIMAG.
Participation in regular classes and summer schools: Between 2017 and 2019 I have been involved in the teaching of Numerical Methods at ENSIMAG.
From 2009 to 2016 I have been involved in the teaching of Numerical Optimization at ENSIMAG.
I have been participating to the Spring School on Nonsmooth Mechanics 2010 and Summer School on Nonsmooth Mechanics 2012 organized by BiPop.
In 2009 I have participated to the teaching of the Mobinet classes.
During my Ph.D., I have been working at Département Télécom and ENSIMAG as a teaching assistant (CIES). I have participated to the teaching of the following topics and projects: Probability and Statistics, Theory of Codes and Algorithmic, Applied Analysis, and Assembler Project in C.
Participation in regular classes and summer schools: Between 2017 and 2019 I have been involved in the teaching of Numerical Methods at ENSIMAG.
From 2009 to 2016 I have been involved in the teaching of Numerical Optimization at ENSIMAG.
I have been participating to the Spring School on Nonsmooth Mechanics 2010 and Summer School on Nonsmooth Mechanics 2012 organized by BiPop.
In 2009 I have participated to the teaching of the Mobinet classes.
During my Ph.D., I have been working at Département Télécom and ENSIMAG as a teaching assistant (CIES). I have participated to the teaching of the following topics and projects: Probability and Statistics, Theory of Codes and Algorithmic, Applied Analysis, and Assembler Project in C.
Students, Postdocs, and Engineers
I am working with a pluridisciplinary group of talented students, postdocs and engineers, with backgrounds ranging from Mathematics and Computer Science to Mechanical Engineering and Experimental Physics. Feel free to contact me if you are interested in any project related to physics-based modelling (including simulation and experimentation).
Current
- Sergio Murillo-Garcia (PhD - start in 2025), co-advised by Sébastien Neukirch (Sorbonne Université), and funded by Sorbonne Université.
- Brice Peres (PhD - start in 2026), co-advised by Victor Romero, and funded by Inria/L'Oréal Research.
- Emile Hohnadel (Postdoc - start in 2025), funded by Inria/L'Oréal Research.
- Post-docs
- Victor Romero (Postdoc 2016-2021), co-advised by Arnaud Lazarus (Sorbonne Université) and funded by ERC GEM.
Now Starting Faculty at Inria, Elan team. - Gauthier Rousseau (Postdoc from April 2018 to March 2019), funded by ERC GEM.
Next position: post-doc in the Géosciences Laboratory in Rennes.
- Victor Romero (Postdoc 2016-2021), co-advised by Arnaud Lazarus (Sorbonne Université) and funded by ERC GEM.
- PhD
- Emile Hohnadel (PhD 2021 - 2025), co-advised by Thibaut Métivet (Inria), and funded by ENS Lyon.
- Jean Jouve (PhD 2021 - 2024), co-advised
by Victor Romero (Inria), and funded
by ENS Rennes.
[PhD Memoir] - Raphaël Charrondière (PhD 2018-2021), co-advised
by Sébastien Neukirch (Sorbonne Université), and funded by ENS Lyon. (Before: research intern from September 2017 to July 2018), funded by ENS Lyon ).
Next position: post-doc at IST Austria, in Bernd Bickel's group.
[PhD Memoir] - Haroon Rasheed (PhD 2017-2021), co-advised by Jean-Sébastien Franco and Stefanie Wuhrer (Inria), and funded by ERC GEM.
Next position: founding a start-up at Inria.
[PhD Memoir] - Mickaël Ly (PhD 2017-2021), co-advised by Mélina Skouras (Inria), and funded by ERC GEM. (Before: IRL student at ENSIMAG and summer intern at Inria in 2016 co-advised by Damien Rohmer).
Next position: post-doc at IST Austria, in Chris Wojtan's group.
[PhD Memoir] - Alejandro Blumentals: PhD 2013-2017 at Grenoble University, co-advised by Bernard Brogliato and funded by UJF and in part by ERC GEM. (Before: Master student at MoSIG and ENSIMAG - 2013)
Next position: Simulation Research Scientist at Apple, Germany.
[PhD Memoir] - Gilles Daviet: PhD 2013-2016 at Grenoble University, funded by Persyval-Lab. (Before: Inria Research Engineer in 2009-2011 and 2013).
Next positions: Simulation Research Scientist at NVIDIA since 2021, and between 2016 and 2021 Simulation Research Scientist at Weta Digital, Wellington, New Zealand.
[PhD Memoir][PhD Award from GdR IG-RV 2017] - Romain Casati: PhD 2011-2015 at Grenoble University, funded by UJF and in part by ERC GEM. (Before: Master student at MoSIG and ENSIMAG in 2011, TER student at ENSIMAG and summer intern at Inria in 2010 co-advised by Franck Hétroy).
Next position: Professeur Agrégé of Mathematics, France (since September 2015).
[PhD Memoir] - Alexandre Derouet-Jourdan: PhD 2010-2013 at Grenoble University, funded by ENS Lyon, co-advised by Joëlle Thollot. (Before: Master student in 2010 at MoSIG and ENS Lyon, co-advised by Joëlle Thollot).
Next position: Research Scientist at OLM Digital, Tokyo, Japan (since January 2014).
[PhD Memoir]
- Research engineers, master students and interns
- Alice Teixeira (Research Engineer from 2021 to 2024), co-advised
by Mélina Skouras
and Thibaut Métivet, and funded by
the Elan team (Inria).
Next position: Simulation Engineer in Grenoble - Octave Crespel (Research Engineer from 2023 to 2024, funded by Inria).
Next position: Simulation Engineer at Nintendo, Paris - Nicolas Pautet (Research Engineer from October 2016 to September 2017), funded by ERC GEM.
Next position: Simulation Engineer at Siemens, Grenoble, France (since October 2017). - Eric Madaule (Research Engineer from November 2016 to July 2018), funded by ERC GEM.
Next position: Game Developer at Behaviour Interactive, Montr�al, Canada (since September 2018). - Nicolas Parent (first year of PhD, 2020-2021), co-advised by Mélina Skouras and Thibaut Métivet.
- Octave Crespel (Master 2 student at ENSIMAG/Ecole Polytechnique - 2022), co-advised by Thibaut Métivet (Inria), and funded by the Elan team (Inria).
Next position: Research Engineer in the Elan team since 2023. - Adrien Decosse (Licence 3 student at ENS Rennes - 2023).
- Louis Guillet (Master 2 student at Centrale Lyon - 2019), co-advised by Mélina Skouras and Thibaut Métivet (Inria).
Next position: trainee in the Snow and Avalanche Simulation Laboratory at EPFL. - Noura Faraj (Master 2 student at MoSIG - 2009), co-advised by Joëlle Thollot.
Next positions: PhD student at Télécom Paris, then Maîtresse de Conférence at Université de Montpellier since September 2018. - Jean Jouve (Master 1 student at ENS Rennes, 2019), co-advised by Mickaël Ly .
Next position: PhD candidate in the Elan team. - Julien Duron (Master 1 student at ENS Rennes, 2018), co-advised by Gauthier Rousseau.
- Nathan Shourick (IRL student at ENSIMAG - 2019), co-advised by Mélina Skouras and Mickaël Ly (Inria).
- Antoine Marteau (IRL student at ENSIMAG - 2019).
- Gabriel Devillers (IRL student at ENSIMAG - 2017), co-advised by Franck Hétroy.
- Xavier Marchal (TER student at ENSIMAG - 2009), co-advised by Franck Hétroy. [Project website]
- Alice Teixeira (Research Engineer from 2021 to 2024), co-advised
by Mélina Skouras
and Thibaut Métivet, and funded by
the Elan team (Inria).
Projects and Collaborations
Current- I am regularly involved in direct parternships with industry, mostly on the topic of digital hair.
- In 2014 I was awarded a starting grant from the European
Research Council to work on inverse modeling problems related to mechanics and computer
graphics fields. The project, named GEM, has started in 2015 and lasted until February 2022. Within
this project, I have been collaborating with a number of researchers in:
- Computer Graphics: Mélina Skouras (Inria), Rahul Narain (University of Minnesota and IIT Delhi), and Jie Li (University of Minnesota)
- Computer Vision: Stefanie Wuhrer and Jean-Sébastien Franco (Inria)
- Applied Mathematics: Alexandre Derouet-Jourdan (OLM Digital, Japan)
- Soft Matter Physics: Sébastien Neukirch and Arnaud Lazarus (Laboratoire Jean le Rond d'Alembert, Sorbonne Université).
- I was involved in the ANR Cheveux project (2008 - 2010), which focuses on hair simulation for the feature film industry. This project gathers academic (CNRS and Inria) as well as industrial partners. I played the role of Inria coordinator for this project.
- I was coordinating (together with Marie-Paule Cani) the Inria associated team SHARE (2009 - 2011), a common research group with researchers from the IMAGER Lab of the University of British Columbia.
International committees
Conference Founder

|
Graphyz 2022
Organiser and program co-chair of the second graphics-physics workshop (together with Basile Audoly, Benoît Roman, and Mélina Skouras) |
|
|
Graphyz 2019
Creation of the first graphics-physics workshop, and program co-chair (together with Basile Audoly) |

|
ACM-EG SCA 2015
Program co-chair (together with Stelian Coros) |
- ACM Transactions on Graphics, Associate Editor from 2021 to 2024.
- ACM SIGGRAPH Program Committee 2024, 2023, 2019, 2018, 2014, 2013
- ACM SIGGRAPH Asia Program Committee 2016, 2015
- Eurographics Program Committee 2019, 2018, 2015, 2014
- SCA Program Committee 2017, 2016, 2014, 2012, 2011, 2010, 2009
Other professional activities
HDR and PhD CommitteesI was a member of the following habilitation and PhD juries:
- 2025: PhD of Siyuan He (Computer Graphics, Ecole des Ponts Paris), as an examiner
- 2025: PhD of Karim Aït Ammar (Mechanical Engineering, ENS Paris Saclay), as a reviewer
- 2025: PhD of Jiayu Wang (Mechanics/Soft Matter Physics, Sorbonne Université Paris), as an examiner
- 2025: PhD of Joo-Won Hong (Soft Matter Physics, PMMH Paris), as an examiner
- 2025: PhD of Uday Kusupati (Computer Graphics, EPFL), as a reviewer
- 2024: PhD of Quentin Lelidec (Computer Vision, Inria Paris), as a reviewer
- 2024: PhD of Donald Zeka (Mechanics, Université Paris-Saclay), as an examiner
- 2024: PhD of Chloé Palliard (Computer Graphics, Télécom Paris Tech), as a reviewer
- 2023: PhD of Maxime Calka (Computer Sciences, Université Grenoble Alpes), as a president
- 2023: PhD of Ke Wu (Mechanics, Université de Lille), as an examiner
- 2023: PhD of Pierre Zins (Computer Vision, Université Grenoble Alpes), as a president
- 2021: Habilitation Thesis of Damien Durville (Mechanics, Centrale Supélec), as a president
- 2019: PhD of Antoine Sibellas (Mechanics, Centrale Paris Tech), as an examiner
- 2019: PhD of Vincent Leroy (Computer Vision, Université Grenoble Alpes), as a president
- 2018: PhD of Samuel Poincloux (Soft Matter Physics, Sorbonne Université), as a reviewer
- 2018: PhD of Salvatore Salamone (Soft Matter Physics, Université de Strasbourg), as a reviewer
- 2018: PhD of Emmanuel Cottenceau (Mechanics, CNAM Lille), as a reviewer
- 2017: PhD of Vincent Barrielle (Computer Graphics, Centrale Supélec), as an examiner
Links
- A great documentary about women discrimination in research: Picture a Scientist (2022)
- A few French-English translations in maths/mechanics. See also this French-English dictionary for maths.
- You and your research, by Richard Hamming